����CAN��Controller Area Network�� �����ֳƿ��ƾ������磬������BOSCH ��˾�Ƴ������������ڲ�������ִ�в���֮�������ͨ�ţ��ѱ�Ϊ��������ǰ;���ֳ�����֮һ .CAN ���߲��ö�֡�ṹ.���ٲü��������д����ٶȿ�.�ɿ��Ը�.�ṹ��.ʵʱ�ԺͿ�����������ǿ������ŵ� ,�����������ϵͳ��ȫ��.�ɿ���.����Ե�Ҫ���շ�������������ʹ�����ʺ�Զ�������ݴ��估Զ�̿���.����̫����������.ͨ���ٶȿ�.��Ӳ����Ʒ�ḻ����Χ����֧��ȫ�棬���Խ���Զ����ͨ�ţ���˽���̫����CAN ���߽��л������ܹ���Ч����ֲ�ʽ����ϵͳ���ֳ����ߺ��ϲ���Ϣ������Ļ������⣬���Է���ؽ��ֳ����߿���ϵͳΪ������̫���ķֲ�ʽ����ϵͳ������������������ʵʱ�ԣ������������ϵͳ�ķֲ��ԣ�����شٽ�����Ϣ�ӽڵ��豸��������ļ���.��������˻��ڣ��ܹ������ʵ����̫��������CAN ���������ֱ�����ݻ������Ӷ��ﵽͨ����λ��������������Զ��.���� ϵͳӲ�����
��������Ƶ�Ӳ������Ҫ�ɵ�Ƭ����.˫ͨ��CAN ���߽ӿڵ�.��̫���ӿڵ�.EEPROM ��.POE ��ȵ����.����оƬ���ǽ�CAN Э�����ݰ���UDP / TCP Э�����ݰ�����ת�������������̫���ӿ�оƬ��CAN �ӿ�оƬ���п��ƣ�CAN ͨ�Žӿڵ���Ҫ���ڲɼ��ֳ��DZ������ݺ�������оƬ��֮������ݴ��ݣ���̫��ͨ�Žӿڵ���Ҫ��������оƬ������̫��֮������ݴ��䣻EEPROM��ʵ��CAN ���߳�ʼ��������д�����ȡ����.
��������ԭ�����£�����̫���ӿ�оƬ�յ���̫�����ݺ�����Ƭ�����жϣ���Ƭ�������ж���Ӧ��������ݴ���̫���ӿ�оƬ�����ݻ������洢���Լ����ڴ�ռ䣬Ȼ������ת����CAN ��ʽ��ͨ��CAN �ӿ�оƬת����CAN �������磻��CAN �����ϵĽڵ��豸��Ҫ�����ݷ��͵���̫�����ͻ�ͨ��CAN ���߽ӿ�оƬ��Ƭ�������ж��źţ���Ƭ����Ӧ�жϽ�����CAN ���ߵ����ݴ�����Ӧ���ڴ�ռ䣬Ȼ�����ݿ�������̫���ӿ�оƬ�ķ��ͻ�����ת�����ݣ��������̫���ӿ�оƬͨ��RJ45 ����������̫��.
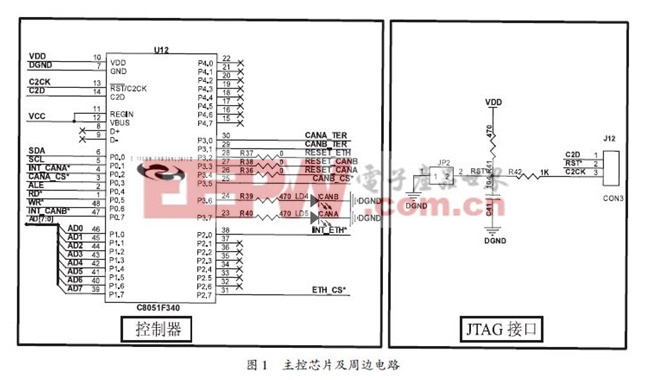
��������оƬѡ�����Silicon Labs ��˾�ĵ�Ƭ��C8051F340,����12V ֱ����Դ����������̫��48V���磬ʹ���ڲ����Ź���Ԫ���ڲ���������.
����C8051F340 ��һ����ȫ���ɵĻ���ź�Ƭ��ϵͳ��MCU ,�����8051 �������ں˾�����ˮ��% ��ָ��ִ��ʱ��Ϊһ��������ϵͳʱ�����ڣ�������߿ɴ�48MIPS;Ƭ�ڵ��Ե��ṩȫ��.������ʽ������ϵͳ���ԣ��������������ʹ�õ��Ը��ӷ��㣬��ʹ�÷���оƬ.Ŀ�����ͷ�ͷ�������ķ���ϵͳ���и���Խ�����ܣ�USB ������֧��8 ���˵�ͨ���������շ���������1 KB ��USB ���棻����һ��10 λ�ĵ���/ ���ADC,ת�����ʿɴ�200ksps,������ģ��ิ�������������跽�����16 λ�ɱ�̼�����/��ʱ�����У�����5 �����Ƚ�ģ�飬ͬʱ����4 ��ͨ��16 λ��ʱ��/ ��ʱ����40 ����5V ��ѹ�Ķ˿�I/O;�洢���������4352Byte ������RAM ��64KB ��FLASH �洢�����ڲ�������������ʱ�Ѿ���Ϊ12MHz��1. 5% ,ʱ�ӻָ��������ڲ�������4 ��ʱ�ӳ���ϣ��ṩȫ�ٷ�ʽUSB ʱ��Դ������Ƭ���ϵ縴λ.ʱ�Ӷ�ʧ�������VDD ������ԭ��ͼ��ͼ1.
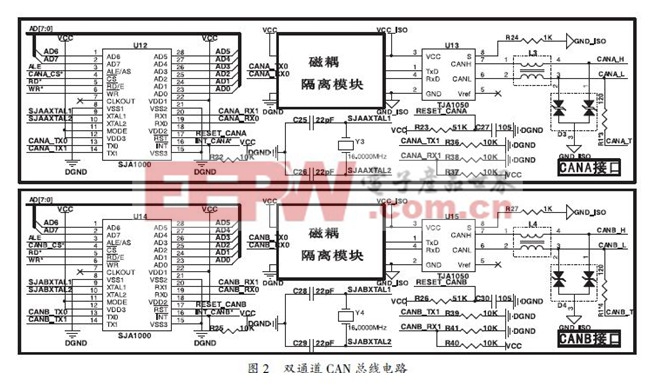
����.NXP ��˾TJA1050 ����CAN �����շ���.Ϊ�����CAN ���ߵ�Ŀɿ��ԣ�������в���˫�����CAN���߽ṹ���������Ϊ���ڸ��ڵ��豸֮�䲼����������CAN ��ϵͳͨ�����ߣ���������CAN ���߿��Ƶ�ֱ����ӵ���CAN ����ͨ�ϣ���������������������ϴ�����ͬ��ͨ�����ݣ���һ�����߳��ֹ���ʱͨ��������Ȼ����ͨ����һ�����������ߴ��䣬��Ӱ��ڵ��豸������ͨ�ţ�Ȼ��Թ����������³�ʼ��ʹ��ָ�����Ͷ��ʹ�ã�������ʹһ��ͨ��ͨ�����ֹ���Ҳ����Ӱ������ϵͳ�����ݴ��䣻ͬʱ���ǹ�ҵӦ�ã���CAN ���߿�������CAN �����շ���֮����и���.

�����ڵ��н�SJA1000 ��AD0 ~ AD7 ֱ��������оƬ�ĵ�8 λ��ַ/ ���ݸ�������������MODE ������+5V ����ʹ��SJA1000 ������Intel ģʽ[4] , ��SJA1000 ���ж�����źŷֱ�������C8051F340 �Ķ˿�P0. 2 ��P0. 7,ʹ��CAN ͨ�ſ��Բ����жϻ��ѯ���ַ�ʽ����������˫����CAN ����MHz,��λ�źŲ���������λ����ϸ��ԭ��ͼ��ͼ2.
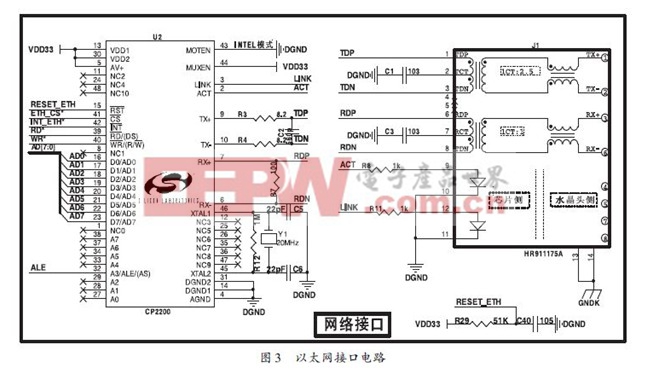
��������̫���ӿڵ���ѡ��Silicon Labs ��˾��CP2200 ��Ϊ��̫��������������HanRun ��˾���ڲ�������̫�������ѹ��.�ƺ�RJ45 ������HR911175A ����̫���ӿ�.CP2200 ��Silicon Labs ��˾�Ƴ���һ��������8 λ���߿��Ƶ���̫������оƬ������Χ��dz���������IEEE 802. 3 ��̫�����ʿ������� MAC ��.10 BASE �C T �����㣨PHY�� ,��ȫ����100/1000 BASE-T ���磬�����Զ����Լ��;������ܣ���������Ӧ�ع�����ȫ˫�����˫��ģʽ�����н������ݰ��жϺ������жϹ���.CP2200 �ڲ�����2K �ֽڵ�ר�÷��ͻ���RAM��4KB ����FIFO ����RAM ,ͬʱ������8K �ֽڵ��ڲ�����ʧ��Flash �洢�������ڴ洢�û�.Web���������ݣ��������6 ���洢��Ԫ�ǹ���Ԥ��̵�Ψһ48 λMAC ��ַ ,�����ⲿEEPROM .��оƬ8 λ�������߽ӿ�֧��Intel ��Motorola ���� �����϶˿�I/ O ���ŵ�����������������������̫��ͨ�Ź��ܣ�����ʹ�ø��û�Ǹ��÷�ʽѰַ���ڷǸ���ģʽ�����ݴ����ʳ���30Mbps,����ֱ������LED ��ʾ���硰���ӡ�.�����״̬.
�����ڵ���CP2200 �������ݵ�ַ����ģʽ������Ƶ��Ϊ20M,CP2200 ��TX.RX �������ӵ�RJ45 �������շ���ţ�ͬʱ���ź�LINK.ACK Ҳ���ӵ����ߵ�LED ��������ϣ���ϸ��ԭ��ͼ��ͼ3.
�����õ��������ʵ��CAN ���߳�ʼ��������д�����ȡ���ܣ� �����ѡ����512KB ��EEPROM24C512 оƬ.��ϸ��ԭ��ͼ��ͼ4.

������̫�������ֱ����TI ��˾�ĵ�Դ������оƬTPS 2383 �͵�Դ�ӿ�оƬTPS 2370,��2 ��оƬ��ȫ������̫�������IEEE 802. 3af,������2 ��оƬ����ͨ��1 ��������̫�����¾�ʵ��ͬʱ������ܺ�����.
��������Ƶ�������Ҫ��Ϊ�����֣� CAN-��̫��Э��ת������.CAN ͨ�ų������̫��ͨ�ų���.������������˼Ϊ����CAN ���߽ڵ��豸��Ҫ����̫����������ʱ������ͨ��CAN ͨ�ų����ȡCAN ���߽ڵ��豸������CAN Э�����ݰ���������洢��CAN ���߽ӿڷ��ͻ������У�Ȼ�����CAN-��̫��Э��ת������CAN Э�����ݰ����������·�װ��TCP ��UDP ���ݰ�����������̫��ͨ�ų������ݷ��͵���̫����Ҫ������ͨ����̫������һ��CAN�ڵ��豸ʱ������ͨ��������̫��ͨ�ų�����̫��������ϵ�TCP ��UDP ���ݰ��洢����̫���ӿڵķ��ͻ�������Ȼ�������̫��-CAN Э��ת������TCP ��UDP ���ݰ���������װ��CAN Э�����ݰ���֮���ٵ���CAN ͨ�ų���CAN �ӿڷ��ͻ������е����ݷ��͵�CAN ���� CAN ͨ�ų���
����CAN ͨ�ų�����Ҫ�������¼����֣�SJA1000 ��ʼ������.��дSJA1000 �ڲ��Ĵ�������.CAN ���ݷ��ͳ���.CAN ���ݽ��ճ���.CAN ����������Ƴ���.
����SJA1000 �ij�ʼ��������Ҫ�������趨���������нڵ�ĵ�ַ.���������Ͻڵ��豸�IJ�����.���ÿ������Ĺ���ģʽ.�����жϼĴ���.����Ĵ�������ص�оƬ�Ĵ��� .CAN ���ݷ��ͳ���Ĺ����ǵ�����CAN Э�����ݰ����ڵ��豸ʱ������CAN ���ݷ��ͳ���ͨ��������д��SJA1000 �����ݷ��ͼĴ�������ʵ�����ݷ���.CAN ���ݽ��ճ���Ĺ����ǵ�SJA1000 ���յ�����ʱ����Ƭ�������ж�����Ƭ����Ӧ�жϺ����CAN ���ݽ��ճ����ȡSJA1000���ڲ��Ĵ������������ݽ��ջ������н��յ������ݶ�ȡ����Ƭ������Ӧ�洢�ռ���.
����CAN ����������Ƴ���Ļ������˼Ϊ�����ϵ��ʼ��ʱͬʱ�����������߿��������жϣ��ڽڵ��豸����λ���������ݵ�����£���Ƭ��ͨ����CAN ��������λ��������ͬ���ݵ�������ʵ������Ч��.�ڽڵ��豸����ͨ�����ݵ�����£����������߿�����ͬʱ���յ�������λ���ı���ʱ�����ֱ�ͨ����ͬ���ж϶˿���Ƭ�������ж�����Ƭ������Ӧ�ȵ�����ж������źź�����жϷ������ر��жϣ����ڶ����ݽ��д�����ɺ�����жϲ���һ����ʱ���ٴ������жϣ������Ϳ������κ���һ��CAN �������ж��ź�.���һCAN ���߽ӿڵ���ֹ��ϣ���ô���Ͳ�������ж��źţ���Ƭ��ֻ�ܽ��յ���һ����CAN ���߿��������ж��źţ��Ӷ�ͨ��������CAN ���߽������ݣ������Ϳ���ʵ��˫ͨ�������Ŀ�ģ��ڽڵ��豸����λ��֮��������ݷ��ͺͽ��պڵ��豸��ͨ����CAN ���ߴε�Ƶ�ʽ�������λ�����͡��������źţ���������λ���ش�����Ӧ��Ϣ�����һCAN ����״̬�쳣�������������͡��������źţ���ڵ��豸�ĵ�Ƭ���Ͳ����յ���Ӧ��Ϣ���Ӷ����Դ���������������㣬�������������ֵ�ۼӵ��趨ֵʱ����Ƭ���ͻ���쳣��CAN ���߽ӿڵ縴λ�����г�ʼ��ʹ��ָ�������˫ͨ��CAN ���� CAN / ��̫��Э��ת������
����CAN/ ��̫��Э��ת������Ĵ����������£���ϵͳ���յ����ݺ���ȶ����ݵ��������ͽ����жϣ�������յ�����������̫�����ݣ��ͻ�����ȥ��IP ͷ.TCP ��UDP ͷ��Ӧ�ò�ͷ ,Ȼ����������ݷ�װΪCAN ���ĸ�ʽ��������CAN �ӿڵ緢�ͻ���������CAN �ӿڵ緢��CAN ��������Ӧ�Ľڵ��豸.������յ���������CAN Э�鱨�ģ�����������ݲ��֣�Ȼ�������ݲ��ַ�װ�ɵ�Ӧ�ò��ʽ��������̫���ӿڷ��ͻ�������������ݷ�װ����̫��֡��ʽ��ͨ����̫���ӿڵ緢������̫��.
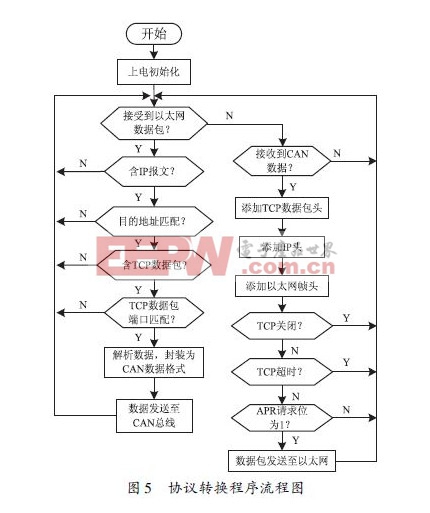
������̫�����ݵķ��ͺͽ��ճ�����������оƬC8051F340 �Ĵ����ٶ��Լ��ڲ����ɵ���Դ���ޣ������ܼ������е�TCP/ IP Э�飬�����Ҫ��TCP/ IP Э������ʵ��ļ��ú����ʹ�� .�ڱ�����е�Э��ջ��Ҫ����IP Э��.ICMP Э��.TCP Э��.ARP Э�� .
������������Ϊ��CP2200 оƬ����̫�����յ���Ч���ݺ�Ƭ���������س������ݰ���CP2200 �Ľ��ջ�������ȡ��Ȼ���жϸ�����֡��IP ���ݰ�����ARP ���� ,����ж�Ϊ���յ�����IP ���ݰ�ʱ����ô�ͼ����ж���UDP ���ݰ�����ICMP ���ݰ��������UDP ���ݰ�������UDP ���ݰ��ײ��Ķ�ȡ�����������Ӧ���ݣ����CAN Э�����ݵ���ȡ������洢����Ӧ�����ݻ��������Ӷ�ʵ����̫�����ݵĽ��룻����жϽ����ICMP ���ݰ���ô�ʹ��������ݰ�����һ������IP ���ݰ���������յ�����ARP ���ݣ����ж�����ARP ������ARP Ӧ���ݽ��������Ӧ�Ĵ��������������֡�Ȳ���IP ���ݰ��ֲ���ARP���ݣ���ô�ͽ���������Ϊ��Ч���ݶ�����������ʼ�����ݽ��ջ�����.
����