单元、执行器、传感器大量增加,为了线束的重量和各电控单元的协调工作,进行车身的网络化设计是必要的。
考虑到数据传输速率、协议机制、可靠性、容错性和成本的要求,车内网络的类型依赖于它们的应用领域,不同网络类型的介绍和应用见表1。
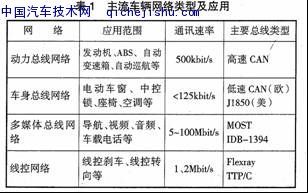
从国际上的技术趋势分析,集中式控制正在向分布式控制发展,这样不可避免带来系统成本的增加,LIN网络作为CAN网络的一个补充,采用单线传输有效解决了成本问题,车身总线网络成为CANLIN的混合网络。
本项目开发的车身总线系统功能主要包括电动车窗控制(带有防夹功能)、中央集控锁(带有遥控功能)、防盗报警、电动后视镜、雨刮器/洗涤泵控制及后视镜除霜等,整个系统包括5个节点,采用低速CAN通信,波特率为100kbit/s,信息编码采用SAEJ1939编码规则。系统的框架结构如图1。
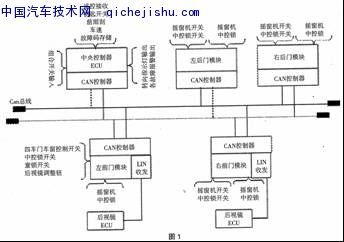
其中中央控制器作为一个网关,采集各种开关和传感器信号,通过CAN总线通信,协调整个系统的工作。
中央控制器的核心单元采用的是freescale的Mc68HC08AZ60,该芯片内部带有60K的flash mem-ory ;2K的RAM,1K的eeprom用于系统保存故障信息并且有SPI模块和外围的智能芯片通讯,增强的SCI模块实现LIN总线位的A/D模块,CAN控制器和定时器单元。中央控制器的硬件结构示意图如图2 。
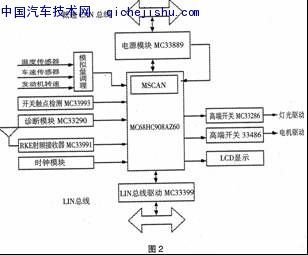
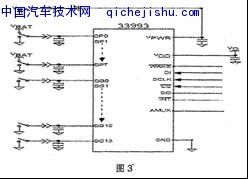
系统需要采集的输入量包括脉冲量、开关量和模拟量。开关量包括组合灯光开关,前雨刷开关,洗涤泵开关,车内灯开关和起动钥匙等大量的开关信号,为了节约系统资源,采用了MC33993触点监测模块来扩展系统的I/O口,MC33993具有22输入,其中8可以配置成接地或者接电源,其余14为接地开关监测,通过SPI与微控制器通讯,并且可以开关电平跳变触发中断,因为是接地检测,无需采用光电隔离,极大的节约了资源,增强了系统的EMC性能。如图3
车内温度等模拟量传感器由中央控制器供电,与外部信号经电气隔离,经过低通滤波进人系统A/D模块,因而可有效地防止外部干扰。
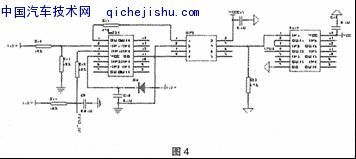
车速信号可以从仪表输出得到,也可以采集车速传感器器信号,安装在变速器上的车速传感器每转一圈产生一个脉冲信号,经过隔离、电平转换和整形后,进人TPU通道。TPU工作于输人跳变计数(ITC)模式,通过2次跳变的时间差来检测车速信号。需要注意的是车速传感器可能是公用的,在设计过程中需要考虑从传感器拉出电流的大小,如图4所示。
为了实现整车有效控制和管理,各控制器之间需要信息共享,因此本系统的所有信息交换都采用CAN总线和局部的LIN总线。低速CAN总线物理接口采用了系统集成电源模块MC33889,其内部集成了低速CAN驱动器,并且提供系统5V的电源,与微控制器之间采用SPI通讯可以配置模块的功能。LIN总线,单线功率驱动模块和电源模块功率驱动主要是车内灯光和电机驱动,包括雨刷电机和洗涤泵电机。本设计采用的是基于VMOS管的智能驱动芯片MC33286和MC33486,MC33286具有2输出,每一具有6A输出电流,并且具有短、过温和过压等故障功能,故障信息可通过电流反馈标志端由微控制器读取。MC33486具有2输出,每一具有10A输出电流。这有利于系统的故障检测和提高系统的安全可靠性。
系统为了降低成本,没有采用DC-DC电源隔离,而是选者了系统集成电源模块MC33889,内部集成了CAN驱动器,并且具有硬件看门狗功能,同时有2的输人和两5V输出,可配置工作在4种模式(调式、正常、睡眠、停止)下,满足系统的需求,降低功耗和增强系统的抗干扰性能。
因为中央控制器靠近点火系统,电磁干扰较大,在电源模块上安装了屏蔽壳,在电中加入滤波和去耦电容。在电设计、元器件布置和布线时,严格按照电磁兼容(EMC)的设计原则。电板采用模块化设计,模拟电、数字电和功率电布置,用地线将数字区与模拟区隔离,尽可能把干扰源与器件(如单片机、存储器等)远离。尽量选用集成度高和表面安装的元器件,以减少元器件数目、减小元件之间的连线长度、电板的面积与高度,使印刷电板布局简单,因而大大降低了故障率和受干扰的可能性。
由于MC68HC908AZ60支持高级编程语言,软件可以方便地采用分层结构和模块化的设计思想,以及实时多任务的机制,因此可有效地提高系统的可靠性和实时性。除此之外,在细节上采取了以下措施:对模拟量采用畸值剔除和一阶递推滤波算法;对开关信号延时、防抖和多次校验来防止误操作;对控制量采用冗余技术确保操作的可靠性;对CAN上接受和发送的数据用阀值进行并判断其有效性;采用Watch Dog和软件陷阱来提高软件运行失常时的自恢复能力
推荐: