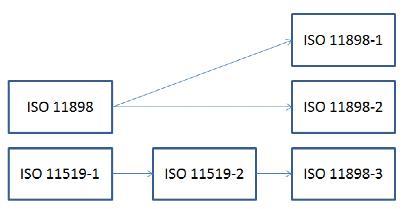
1986年Bosch在SAE(汽车工程人员协会)大会上提出CAN总线概念,CAN总线率先在汽车电子行业孕育。随后的1987年Intel推出第一片CAN控制器芯片82526,由此点亮CAN总线发展的星星之火。六年之后CAN国际标准ISO11898/ISO11519发布,CAN总线在通信领域的燎原之势由此展开。
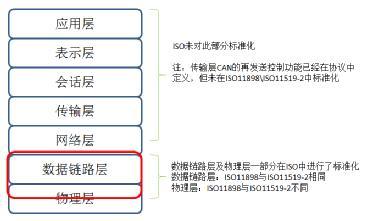
与高速CAN一样,容错CAN也是使用使用差分双绞线传输,包含CAN_H、CAN_L、GND三根线,在严格的工业应用场合同样要求使用专用的屏蔽双绞线并加必要的防护电。如图3,以OSI7层通信模型为例,其实CAN总线标准规范了部分物理层、传输层及全部数据链层规则,而应用层、表示层、会话层、网络层未做任何规范。高速CAN与容错CAN在数据链层内容是相同的,因此它们在位传输时序、位仲裁、错误、校验、帧结构等是没有区别的。
不同点在物理层的定义,图4是ISO11898与ISO11519-2电信号数据对比。从图中可以看到,高速CAN最大通信速率为1Mbps,容错CAN最大通信速率为125Kbps,且在理论连接节点数方面高速CAN要大于容错CAN。两者在物理层最大的差别在于CAN_H、CAN_L显隐性时的电平值。因此容错CAN与标准的高速CAN设备之间不能直接通信,必须要加入CANBridge1054转接板。

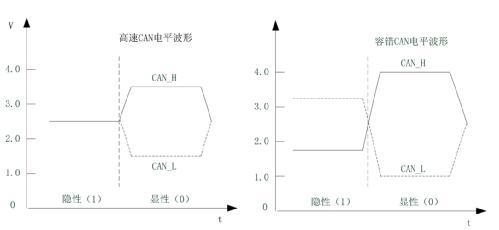
虽然容错CAN通信速率低、承载节点数少,但容错CAN有它无可替代的优势。根据图4中的电平信号数据,我们绘制出两者正常工作时的信号波形。从图5可以看出CAN_H、CAN_L的电平在显隐性变化时变化高达2.25V,而高速CAN电平变化仅为1V,这也就意味着容错CAN比高速CAN有更高的抗干扰性。
除此之外,容错CAN能在CAN_H或CAN_L出现短、断时通信正常。容错CAN收发器会自动识别总线状态,根据总线状态调整接收器的接收模式,这也算是“容错CAN”名称的由来。图6是容错CAN收发器在不同情况下收发状态的调整情况。
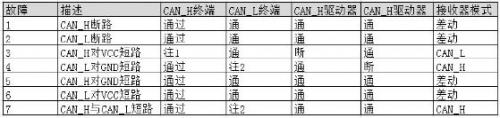
图7为经典的CTM1054T容错CAN收发模块为例,它采用灌封工艺并具有极低的电磁辐射和高抗电磁干扰特性。完全符合ISO11898-3标准,单网络最大节点数达到32个。

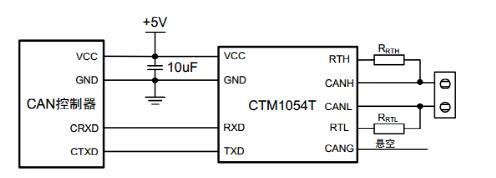
容错CAN节点电设计与常见的高速CAN节点设计不同,需要注意的是终端电阻的接法。一般场合下,模块接上电源,端口和CAN控制器及CAN网络总线连接,RTH、RTL分别连接终端电阻至CANH、CANL,如图8。
典型网络如图9,单总线km。如果需要接入更多节点或更长通讯距离时,可通过CAN中继器等设备扩展。容错CAN收发器在总的终端电阻为100Ω时,有最优的系统性能。容错CAN总线终端电阻配置时先确定整个网络的节点数,每个收发器都提供总100Ω终端的一部分,并不要求每个收发器都有相同的终端电阻,但总的终端应该是100Ω。比如总线个容错CAN节点,接到网络上的10个电阻阻值均应为500Ω;若总线个容错CAN节点,接到网络上的20个电阻阻值均应为1000Ω。由于容错CAN终端电阻配置的这种特殊性,只要节点数确定,可根据需求随意使用星形、树形等总线容错CAN总线网络拓扑
容错CAN在非常适合应用在低速、高可靠性的工业场合,当节点数固定时,它能适应多种复杂总线拓扑。
推荐: