,采用三段式启动方法实现了电机的软启动。软硬件结合实现了MOS管自检、过流、欠压的功能,提高了
近年来,无人机(Unmanned aerial vehicle,UAV)的研究和应用广泛受到各个方面的重视。四旋翼飞行器作为UAV的一种,能够垂直起落、空中悬停、可适用于各种飞行速度与飞行剖面,具有灵活度高、安全性好的特点,适用于警务、新闻摄影、火场指挥、交通管理、地质灾害调查、管线巡航等领域实现空中实时移动。
四旋翼飞行器的动力来源是无刷直流电机,因此针对该类无刷直流电机的调速系统对飞行器的性能起着决定性的作用。为了提高四旋翼飞行器的性能,本文设计制作了飞行试验平台,完成了直流无刷电机无感调速系统的硬件、软件设计。通过试验证明该系统的设计是可行的。
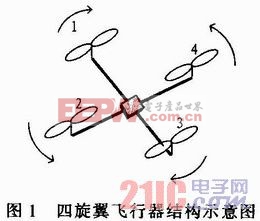
四旋翼微型飞行平台呈十字形交叉,由4个电机驱动螺旋桨组成,如图1所示。当飞行器工作时,平台中心对角的螺旋桨(如1与3)转向相同,相邻的螺旋桨(如1与2)转向相反。同时增加减小4个螺旋桨的速度,飞行器就垂直上下运动;相反的改变中心对角的螺旋桨的速度,可以产生滚动、俯仰等运动。
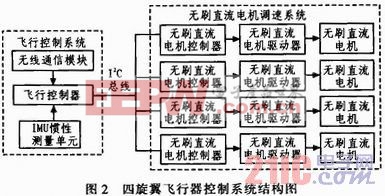
四旋翼飞行器的控制系统分为两个部分,飞行控制系统与无刷直流电机调速系统。飞行控制系统通过IMU惯性测量单元(由陀螺传感器与加速度传感器组成)检测飞行姿态,通过无线通信模块与地面遥控器通信。4个无刷直流电机调速系统通过I2C总线与飞行控制器通信,通过改变4个无刷直流电机的转速来改变飞行姿态,系统采用12 V电池供电,控制系统结构图如图2所示。
无刷直流电动机既具有运行效率高、调速性能好,同时又具有交流电动机结构简单、运行可靠、方便的优点,是电机主要发展方向之一,现已成功应用于军事、航空、计算机、数控机床、机器人和电动自行车等多个领域。在该四旋翼飞行器上使用了新西达2217外转子式无刷直流电机,其结构为12绕组7对磁极,典型KV值为1400。
通常无刷直流电机的控制方式分为有传感器控制方式和无传感器控制方式。有传感器控制方式通过在定子上安装电磁式、光电式或者磁敏式传感器来检测转子的,为驱动电提供换向信息。无传感器的控制方式有很多,包括磁链计算法、反电动势法、状态观测器法、电感法等。在各种无传感器控制方法中,反电动势法是目前技术为成熟、应用最广泛的一种检测方法。本系统采用的反电动势过零检测法是反电动势法中的一种,通过检测各相绕组反电动势的过零点来判断转子的。根据无刷直流电机的特性,电机的最佳换向时刻是相反电动势过零点延迟30电角度的时刻,而该延迟的电角度对应的时间可以根据两次过零点时间间隔计算得到。