����ϵͳ����Ʒ���������ҪӲ�������������������ϸ��ƣ�����������Ӧ�ĵ�ԭ��ͼ�ͳ�������ͼ������ת�ٵ����㷨���øĽ�����Ԫ����ӦPID�����㷨��ͨ������Ӧ�������Ʋ���������˿���ϵͳ�Ե�����Ӧ�ԡ�ͨ��ʵ���֪������Ƶ���ˢֱ��
������ˢֱ������ǵ������Ӽ��������Ӽ������������ۺ͵���������ϵIJ����������ʱ��̡�����ת�غ��ƶ�ת�ش��ٷ�Χ�ṹ�������͡��ɿ��Ըߡ����ڳ����ŵ㡣���㷺Ӧ���ڹ��������պ��졢�����ˡ���ƽ������˻����綯���������õ������칫�Զ����Լ���ҵ���̿��Ƶ�����
�������ĸ����˻���TMS320F28335DSP����ˢֱ������Ŀ���ϵͳ��Ʒ������Կ���ϵͳ����ҪӲ����ģ���������ϸ��ƣ��������������Ϳ��Ƶ����ơ���������ת�ٵ����ӳ������Ʒ�����
�����ٶȵ����㷨ͨ�����ô�ͳPID�����㷨�������Ŀ��Ʋ�������һ��������ʽ��Ҫ���ڸ������нζ��ﵽ���õĿ���Ч����������ȷ����������ʵ�֡����ף�3�������һ�ֻ���ģ�����ڵ����߷���PID���ƣ����д�ͳPID���ƽṹ���ɿ��Ըߡ�³����ǿ���ŵ㣬����˿������ԺͶԹ�������Ӧ�ԣ����ף�4�ݽ���Ⱥ�Ż��㷨�͵���Ԫ����Ӧ���ƽ�ϣ�Ӧ������ˢֱ������Ŀ���ϵͳ�У������ϵͳ������Ӧ�ԣ����ף�5�ݽ��Ŵ��㷨��ģ�����ƽ�ϣ��Ե�������Ż����ƣ�����ϵͳ������Ӧ�Եõ�����ߡ����ף�6������RBF���������ˢֱ���������ϵͳ�����Ż����Ե��ת�ٺ����������ʵʱ�����������������Ȩ������ͨ�����Ƶ����ѹʵ�ֶԵ��ת�ٵĿ��ơ�
�������IJ��øĽ�����Ԫ����ӦPID�����㷨�����ԶԿ��Ʋ�����������Ӧ�������Ӷ����ϵͳ�Ե�����Ӧ�ԡ�ʵ����������õĸĽ�����Ԫ����ӦPID�����㷨����ʹ��ˢֱ���������Ӧʱ����̣��������Ͳ�����С��
������TMS320F28335DSPΪ���Ŀ���оƬ���������ˢֱ���������ϵͳ��DSPͨ�������CAPl��CAP2��CAP3���������������źţ����������жϣ�ͨ����ȡ3��CAP�ڵĵ�ƽ״̬���õ���������֣�Ȼ��DSP������Ӧ�Ŀ���ָ��Ըı�PWM�źŵĿ������������ı俪�عܵĵ�ͨ˳��ʵ�ֶԵ��ת�ٺ���ת����Ŀ��ơ�����ϵͳ����ƿ�ͼ��ͼ1��ʾ��
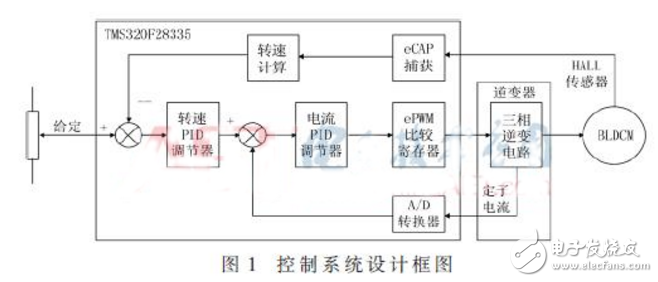
��������ϵͳ�Ŀ��ƶ���Ϊ24 V/65 W������8����ˢֱ�����������ת�١�����˫�ջ�ʵ�ֶԵ����ת�ٿ��ơ�ϵͳ���Ϊ�ٶȻ���DSP���ݸ����ٶ�ֵ�뾭�����������õ����ٶ�ֵͨ���Ľ�����Ԫ����ӦPID�����㷨�õ���������ֵ���ڻ�Ϊ�����������ٶȿ������������������ֵ���ɾ�A/D�����õ��ĵ���ֵ�Ƚϣ�ͨ����ͳPID�����㷨��������Ӧ��PWM�����źţ�ʵ�ֶԵ���ĵ��ٿ��ơ�
�������ʱ任�����Ҫ�����ǽ�ֱ��ĸ�ߵ�ѹ���Ϊ������ѹ��������ˢֱ�������ת�����ĵĿ��ƶ�����65 W����С�͵������˹��ʱ任���������оƬ+MOSFE�ķ�ʽ��DSP�����PWM�źž������ʷŴ����봦������������оƬ�����ʹ�MOSFET��ͨ�ضϡ�
��������оƬѡ��International Rectifier��˾������IR2136����оƬΪ�����������������ɵ磬������������ˢֱ�����������ͬ���ͽ����첽����ȡ�����оƬ�ĵ�ͼ��ͼ2��ʾ��

����ͼ2�У�������D1��D2��D4�����C4��C5��C6�����ѹ�磬�����ܵ������Ƿ�ֹ�������࣬���ݵ������Ǵ洢��ѹ������Ƶ�ʽϸ�ʱ����ѹ��ĵ�ѹΪ�����ѹ���ϵ��ݴ洢��ѹ�����µ�ѹ���������ѹ����Ϊ�����������ѹ��ֵ��ʹ����оƬ�ܹ��ɿ���������ѹ��ʹܵĿ�ͨ��
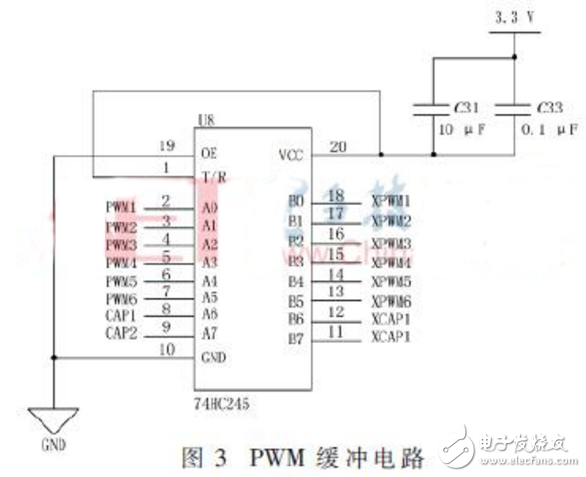
����TMS320F28335��ePWMģ����ePWM1~ePWM6��6����ģ�飬ÿ��ePWM��ģ������PWM������ֱ�ΪePWMxA��ePWMxB�������������6�����ʹ�MOSFET��ɣ�ÿ���ű��ϵ��������ʹ�MOSFET�Ŀ����ź�����������ԣ�ǰ3��ePWM��ģ�飨ePWM1��ePWM2��ePWM3���Ϳ���������ˢֱ������Ŀ���Ҫ��PWM�����źŷֱ�ΪePWM1A��ePWM1B��ePWM2A��ePWM2B��ePWM3A��ePWM3B����ΪDSP��������źŵĸ����������ޣ����������PWM�ź���Ҫ�������ʷŴ�����������������ѡ�õĹ��ʷŴ���Ϊ74HC245����Ӧ�ĵ���ͼ3��ʾ��
������øĽ�����Ԫ����ӦPID�����㷨ʵ��ת�ٵĵ��ڣ��㷨���ԶԿ��Ʋ�����������Ӧ�������Ӷ����ϵͳ�Ŀ������ԺͶԵ�����Ӧ�ԡ��㷨����ʽ���£�
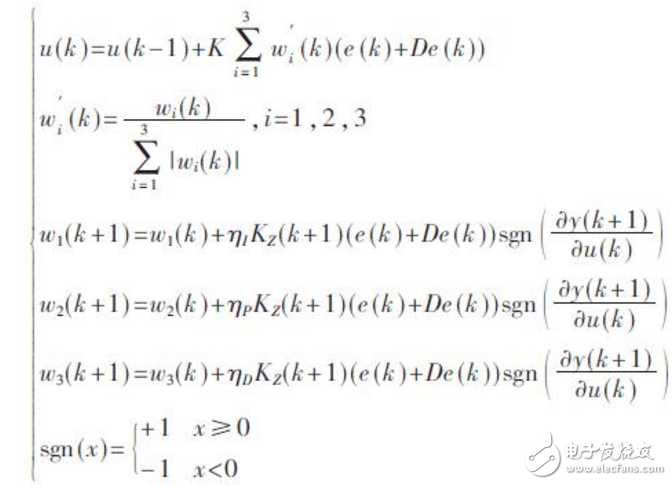
����ʽ�У�I��P��D�ֱ�Ϊ���֡��������ֵ�ѧϰ���ʣ�wi��k��Ϊ��Ȩϵ����KΪ����ϵ����K��0��e��k��Ϊ�ٶ�ƫ�De��k��Ϊ�ٶ�ƫ��ı仯����
�����㷨��ʵ�ֹ���Ϊ���������ʱ��ͨ��DSP��ͨ�ö�ʱ�����Ի�ȡ�������λ����źű仯��ʱ�������Ӷ�����������ʵʱת�١�������ٶȱȽϣ����Եõ�ת�ٵ�ƫ��error�����ϴεõ���ƫ��error_1������ɵ�ƫ��ı仯��d_error�������㷨����ʽ�����Եõ����������ͼ����ͼ4��ʾ��

����ͼ�У�rΪ����ת�٣�yΪ���������ʵ��ת�٣�error��error_1Ϊת��ƫ�d_errorΪƫ��ı仯����lr_p��lr_i��lr_d�ֱ�Ϊ���������֡��ֵ�ѧϰ���ʣ�wp��wi��wd��wp_1��wi_1��wd_1��wp_11��wi_11��wd_11��waddΪ��Ȩϵ����KΪ����ϵ����u��u_1Ϊϵͳ�������
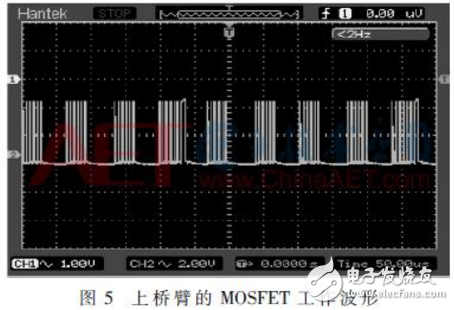
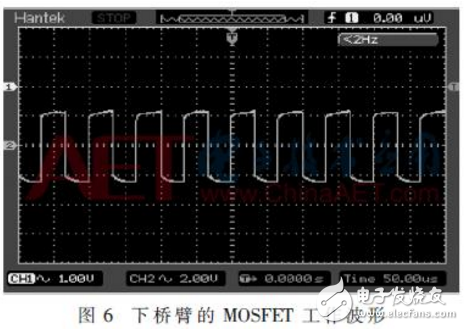
����Ϊ�˽����ʹ�MOSFET�Ĺ�����ģ��������ű۹�����PWM״̬���е�ѹ�Ŀ��Ʒ��������ű۹����ڳ�ͨ״̬����ͼ5��ͼ6�ֱ�ΪA�����űۺ����ű۵�MOSFET�������Ρ�
����ת�ٵ��ڳ��������Ȳ��ô�ͳPID�����㷨�����õ��������ʱ��Ϊ5 s������ת��Ϊ2 500 r/min�������ʼ���У��ڼ�ÿ��50 ms����һ��ת�٣��������������У�5 s����ֹͣ���С�ת�ٵ��ڳ�����øĽ�����Ԫ����ӦPID�����㷨���ظ�����ʵ�飬�ֱ�õ���ͼ7��ͼ8��ʾ���ٶ���Ӧ���ߡ�

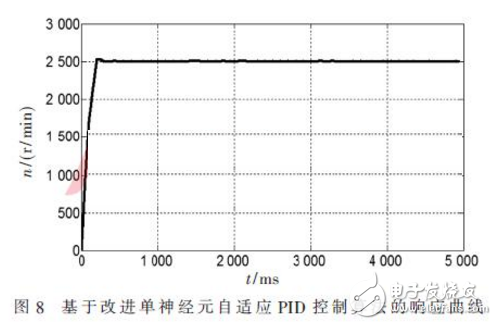
����ͨ���Ա��ٶ���Ӧ���ߣ����Եó����ڸ���ת�٣�2 500 r/min���£����ô�ͳPID�����㷨��ϵͳ�Կ�������������̬����ʱ��Ϊ0.6 s���ҳ������ϴ�ԼΪ20%�����øĽ�����Ԫ����ӦPID�����㷨��ϵͳ�Կ����������ڽ϶�ʱ���ڣ�Լ0.2 s�������ȶ�״̬����������С����Ϊ1%���ң����⣬�ٶ����� ����
��������������8����ˢֱ�����Ϊ���ƶ����������ˢֱ���������ϵͳ������ҪӲ�������������������ϸ��ƣ�����������Ӧ�ĵ�ԭ��ͼ�ͳ�������ͼ������ת�ٵ����㷨���øĽ�����Ԫ����ӦPID�����㷨��ʵ�����������Ƶ���ˢֱ���������ϵͳ�ǿ��еģ�ת�ٵ��ڲ��øĽ�����Ԫ����ӦPID�����㷨������ʹ��ˢֱ���������Ӧʱ����̣��������Ͳ�����С���ﵽ��Ԥ��Ŀ�ġ�
����