CAN(Controller Area Network)控制器局域网,主要用于各种设备监测及控制的局域网。最初由Bosch公司用于汽车的系统而设计,具有良好的功能特性和极高的可靠性,现场抗干扰能力极强, 总线形式为串行数据通信总线X系列芯片,具有处能优良(30MIPS),外设集成度高,程序存储器容量大,A/D转换速度快等特点,是基于工业控制而设计的DSP(数字信号处理)类芯片。LF2407A以其丰富的集成外设,提供了电机数字化控制解决方案。其嵌入式
CAN属于现场总线的范畴,有效支持分布式控制或实时控制的串行通信网络。CAN的应用范围很广,从高速的网络到低价位的多界限都可以使用CAN 。在自动化电子领域的汽车发动机控制部件、传感器、抗滑系统等应用中,CAN的位速率可高达1Mbps。
CAN总线现场设备具有高度的自治性和智能化的特点。3系统的高度分散性。4对现场的适应性强。
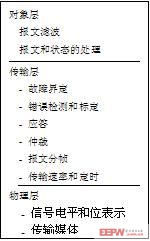
对象层的功能是报文滤波以及状态和报文的处理。传输层是CAN协议的核心。它把接受到的报文提供给对象层,以及接受来自对象层的报文。物理层定义实际信号的传输方法。物理层的作用是在不同节点之间根据所有的电气属性进行位信息的实际传输。
DSP(Digital Signal Processing)数字信号处理,是以数字形式对信号进行采集、变换、滤波、估值、增强、压缩、识别等处理,以得到符合人们需要的信号形式。LF2407A是一款新型工控型数字信号处理芯片,具有如下特点:
1) 32位CPU,32位ALU,16*16位并行乘,3个定标移位器,8个16位辅助寄存器;544字片内数据/程序DARAM,2K的SARAM,32K片内程序FLASH,64K数据和存储器寻址范围;
3) 两个事件管理器EVA、EVB,包含:16PWM通道,10比较CMP单元,4个16位通用定时计数器,6个捕获单元CAP,4个积分编码脉冲QEP单元;
5) 41个可单独编程的多复用I/O引脚;基于锁相环电(PLL)的时钟模块;带实时中断的看门狗定时器模块(WATCH_DOG);串行通信接口(SPI)和串行外设接口(SPI),及CAN 通信模块接口;
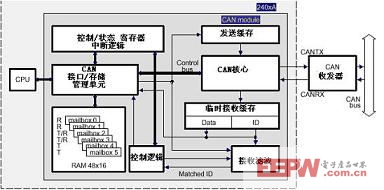
LF2407A芯片内嵌CAN控制模块,集成了一个全CAN功能的16位控制芯片,且与CAN2.0B协议完全兼容,支持标准格式和扩展格式。LF2407A的CAN模块包含两大部分:CAN控制/状态寄存器和CAN邮箱RAM区。其结构框图如下:
CAN 控制器接口----PCA82C250: PCA82C250 是CAN 协议控制器和物理总线的接口。此器件对总线提供差动发送能力,对CAN 控制器提供差动接收能力,符合“ISO11898 ”标准。
推荐: