为了提高整车高压上下电安全,准确诊断出整车动力系统的高压故障并迅速做出相应处理,本文针对纯电动汽车动力系统结构,定义了基于CAN通讯的整车控制网络。以整车安全性为主要参考量,设计了电动汽车整车控制器上电控制策略、下电控制策略以及紧急故障模式下对高压电紧急下电和低压电处理方法,为调试整车控制器及相应的高低压设备奠定基础。

纯电动汽车 (EV) 以动力蓄电池组作为唯一动力源,以驱动电机作为唯一动力驱动装置。蓄电池工作电压高达几百伏,当发生高压电绝缘失效或短等故障时,会直接影响驾乘人员的生命财产以及车载用电器的安全。因此,在设计和规划高压动力系统时应充分考虑整车和人员的电气安全性,确保车辆运行安全、驾驶人员安全和车辆运行安全 。
整车控制器 (VCU) 是纯电动汽车运行的核心单元,担负着整车驱动控制、能量管理、安全保障、故障诊断和信息处理等功能,是实现纯电动汽车安全高效运行的必要保障。
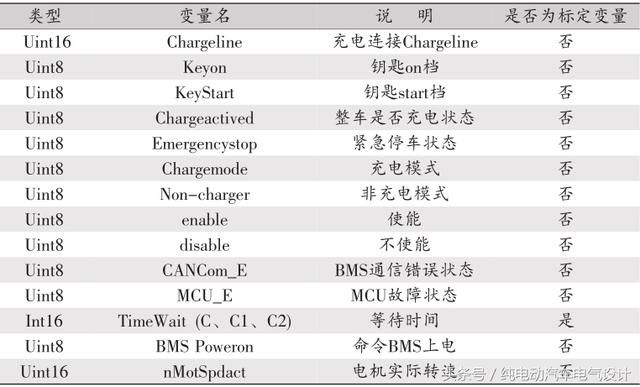
纯电动汽车上下电控制策略开发设计的目的在于:在已有整车动力系统结构的前提下,通过采集钥匙及踏板等驾驶员动作信号,并通过CAN总线、电池管理系统 (BMS) 及电机控制器 ( MCU) 等子系统进行通讯,来控制整车高压上电、下电安全。同时在上下电过程中,力求准确诊断出整车动力系统的高压故障并迅速做出相应处理。目标车型钥匙门开关设置为两挡:OFF挡、ON挡;整车挡位设置为:前进挡 (D挡)、空挡 (N挡)、倒挡 (R 挡)。表1为各主要部件缩略语及其定义。表2为各变量名称及说明。

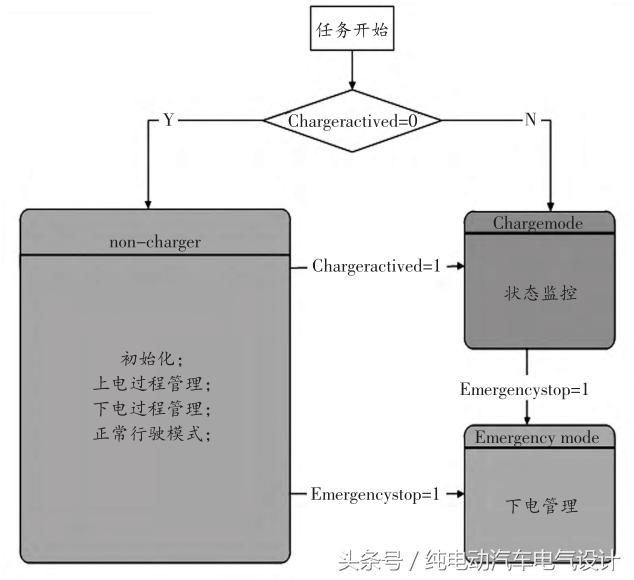
基于钥匙门设置,进行上下电控制,实现整车控制系统初始化、自检、充电状态判断等功能。目标车型整车控制器由低压蓄电池供电,其上电下电状态由仪表板上的低压开行控制。整车模式分为外接充电模式、非充电模式和紧急停机模式。系统充电状态和非充电状态由充电连接线进行判断,充电线已连接为充电状态,否则为非充电状态,紧急停车模式为整车处于最高故障等级进行下电处理。整车运行模式管理如图1所示:
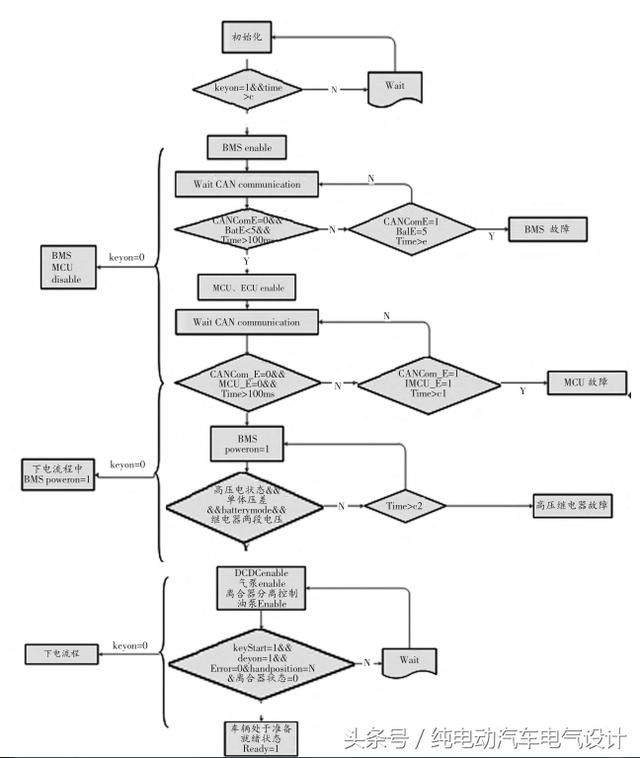
初始化:VCU上电后的准备阶段,该时间段包含VCU的基本配置和自检,VCU自检完成之后,Chargeline==0且keyon==1,则进入下一个过程;
BMS:BMS由VCU控制,BMS后,等待与BMS的通讯,BMS通信连接后,CANCom_E ==0 (BMS通信无故障) 并且电池允许上电,则进入下一个判断过程;若BMS报故障,则终止上电过程,整车状态进入BMS故障模式。
MCU:MCU由VCU直接发布命令,随后MCU等待与CAN通信连接,CAN通信正常连接后,接收MCU的故障状态,若MCU允许上电,则完成高压电上电前的准备过程,进入高压电上电控制;
上高压:VCU发送高压上电命令,BMS来执行预充继电器指令,完成电量总正和总负的控制。VCU通过CAN信息实时电池状态,当高压电状态为连接、电池单体电压差在允许范围内且电池允许放电三个条件同时满足后进入高压电准备完毕状态。在这个阶段如果到keyon==0,则进入高压电的下电流程。当DC/DC正常工作,气泵正常工作,且气压达到一定值时keystart==1,则进入车辆正常运行模式,完成整车上电过程。
降负载阶段:将DC/DC和气泵disable,同时驱动电机扭矩降低,当驱动电机转速小于某个值后,进入高压电下电流程;
高压电下电阶段:VCU判断满足条件之后,发送命令给BMS进行下电,同时VCU高压电状态,当高压电下电完成之后,进入低压下电阶段;
低压下电阶段:VCU向BMS、MCU发送下电请求,等待BMS、MCU进行数据保存,当BMS、MCU允许下电之后,状态为BMSdisable、MCU disable之后对VCU进行下,下电过程控制策略如图3所示。

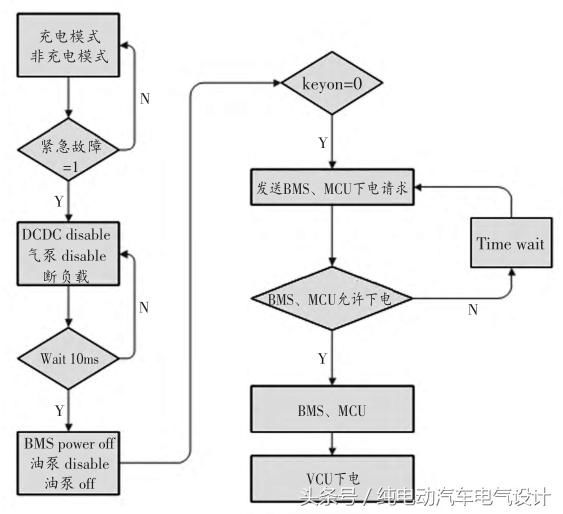
3、充电模式及紧急故障模式控制策略在充电模式下,BMS和高压电上电过程由充电机进行控制,VCU主要起和必要的作用,在充电模式下keystart和加速踏板将不起作用。在紧急故障模式下,主要处理高压电的紧急下电和对低压电进行处理,具体逻辑图如图4所示。
纯电动汽车整车上下电控制策略的核心就是对动力系统高压电通断的控制,在此过程中要准确高效的对上下电进行控制,达到既能快速响应驾驶员动作,又可以整车在上电、下电过程安全性的目的。
本文对于上电、下电控制策略的设计实现了以整车控制器为控制核心的纯电动汽车常规上下电、紧急下电等关键功能,该策略能准确诊断出整车动力系统的高压故障并迅速做出相应处理,为整车控制器及相应的高低压设备调试奠定了基础,对于提高整车动力系统运行安全、驾驶员安全和车辆运行安全具有指导意义。