在Matlab/Simulink下,结合Simulink基础模块与S-Function,提出了无刷直流电机控制系统的设计方案。该系统采用双闭环控制:速度环采用PI控制,电流环由电流滞环比较器构成。仿真结果表明,该方案所设计的无刷直流电机控制系统具有快速、实用的优点。
无刷直流电机(Brushless DC Motor,以下简称BLDCM)是随着电力电子技术及新型永磁材料的发展而迅速成熟起来的一种新型电机。以其启动转矩大、调速性能好、效率高、过载能力强、性能稳定、控制结构简单等优点,同时还保留了普通直流电机优良的机械特性,广泛应用于伺服控制、数控机床、机器人等领域。
随着BLDCM应用领域的不断扩大,对控制系统设计提出了更高的要求。为此,建立BLDCM控制系统的可视化仿真模型,可以有效的减少控制系统的设计时间,同时充分利用Simulink仿真的优越性,加入不同的扰动以及变化的参数,以便考察系统在不同控制条件下的动、静态特性。在分析了BLDCM数学模型的基础上,借助MATLAB的Simulink工具,建立了BLDCM控制系统的仿真模型,并利用该模型,进行了控制系统的仿真试验,结果表明,通过该仿真模型验证了数学模型的有效性及控制系统的合。
BLDCM由定子三相绕组、永磁转子、逆变器、转子磁极检测器等组成,其转子采用瓦形磁钢,进行特殊的磁设计,可获得梯形波的气隙,定子绕组采用集中整距绕组,由逆变器提供给方波电流。BLDCM梯形波反电动势和方波电流之间的关系,如图1所示。

BLDCM的反电动势波形是梯形波,并且定子和转子间的互感正弦的,在此,采用电动机d-q变换理论的方法进行分析效果不理想,而直接利用电动机原有的相变量法,根据转子,采用分段线性表示电动势。
本文以两相导通星形三相六状态方式下,分析BLDCM的数学模型及电磁转矩等特性。为了方便分析,作如下假设:
其中,u a、u b、u c为定子相绕组电压;ia、ib、ic为定子相绕组电流;ea、eb、ec为定子相绕组反电势;L为每相绕组的自感;r为每相绕组的内阻;M为每两相绕组的互感。
由于转子磁阻不随转子的变化,因而定子绕组的自感和互感为。当采用Y形联结时,ia+ib+ic=0,因而有:

如图2所示,BLDCM控制系统采用双闭环控制:速度环采用PI控制,电流环采用电流滞环比较器。将图2所示控制系统分割成各个的子模块,其中主要包括:
BLDCM本体模块、参考电流模块、电流滞环控制模块、电压逆变模块、速度控制模块、转矩计算模块。将各个模块进行有机的整合,即可建立BLDCM控制系统的仿线 BLDCM本体模块
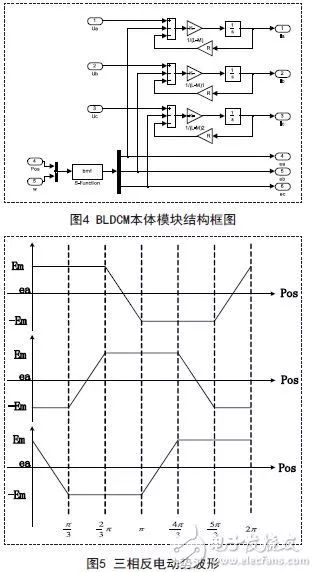
在整个控制系统中,BLDCM本体模块是最重要的部分,该模块根据BLDCM电压平衡方程式(2)求取BLDCM三相相电流,控制框图如图4所示,由电压平衡方程式(2)可得,要获得三相相电流ia、ib、ic,必需首先求得三相反电动势ea、eb、ec.在BLDCM建模过程中,获得理想的梯形波反电动势波形是一个关键的问题。目前求取反电动势常用的方法有:(1)有限元法;(2)傅里叶变换法;(3)分段线所示,将一个运行周期分为6个阶段,每60°为一个换相阶段,每一相的每个运行阶段都可用一段直线来表示,根据某一时刻转子和转速信号,确定该时刻各相所处的运行状态,通过直线方程即可求得反电动势波形。分段线性法简单易行,且精度较高,能够较好的满足仿真建模的设计要求。因此采用分段线性法建立梯形波反电动势波形。

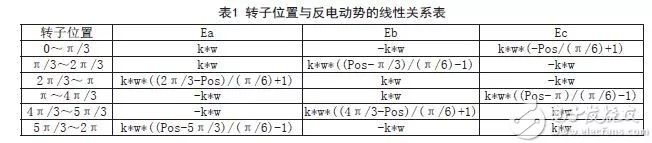
根据图5可以推得转子和反电动势之间的线所示,从而采用分段线性法,解决了在BLDCM本体模块中梯形波反电动势的求取问题。
电流滞环控制模块的作用是实现滞环电流控制,输入三相参考电流以及三相实际电流,输出为逆变器控制信号,模块结构框图如图6所示。将实际电流和参考电流之间的偏差与滞环比较器的环宽进行比较,对应相导通或关断。选择适当的滞环比较器环宽,即可使实际电流波形不断参考电流的波形,实现电流闭环控制。


参考电流模块的作用是根据电流幅值信号Is和信号给出三相参考电流,输出的三相参考电流直接输入电流滞环控制模块,用于与实际电流进行电流滞环控制。参考电流模块采用S-Function编程实现。

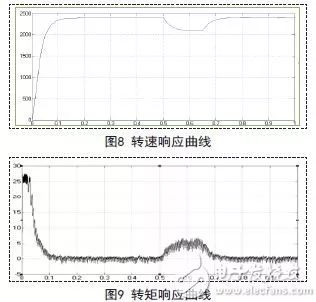
本文基于M a t l a b / S i m u l i n k建立了BLDCM控制系统的仿真模型,并对该模型进行了BLDCM双闭环控制系统的仿真,仿真中BLDCM参数设置为:定子相绕组电阻R=1Ω,定子相绕组自感L=0.02H,互感M=-0.0061H,转动惯量J=0.005kg.m2,额定转速n=2400r/min,极对数p=1,额定电压220V.为了验证所设计的BLDCM控制系统仿真模型的静、动态性能,系统空载起动,进入稳态后,在t=0.5s时突加负载TL=5Nm,在t=0.65s时撤去负载,可得到系统转速、转矩、三相相电流和三相反电动势仿真曲线所示。
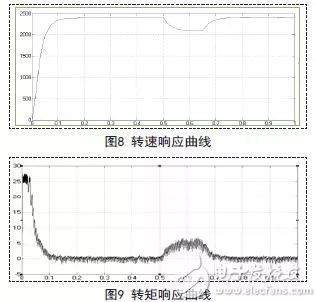
由仿线r/m i n的参考转速下,系统响应快速且平稳,相电流和反电动势波形较理想。图9、1 0表明:起动阶段系统保持转矩恒定,没有造成较大的转矩和相电流冲击,说明参考电流的限幅作用有效;空载稳速运行时,忽略系统的摩擦转矩,此时的电磁转矩均值为零;在t=0.5s时突加负载,转速发生突降,但又能迅速恢复到平衡状态,稳态运行时无静差。仿真结果表明了本文提出的这种无刷直流电机控制系统的设计方案具备有效性及控制系统的合。
延伸相关词:
陈小艺被曝姐弟恋,倒追小伙被当保姆,陆贞传奇演员表,人鱼情未了 电视剧,莫小棋三级,保拉的诱惑,李慧珍老公,luciano rivarola,如意剧情介绍电视猫,电视剧当狗爱上猫